Research

Vision
Artificial intelligence is playing a vital role in shaping the future by automating repetitive tasks and augmenting human labor. Today, the world is becoming increasingly digital, with a growing network of sensors, computers, and smart devices that generate vast amounts of data. This data far exceeds human capacity to process, interpret and take advantage of it. With the increasing computational power, machine learning can offer comprehensive solutions for complex tasks such as image recognition and natural language processing. However, using traditional methods developed for static data may not provide dependable results in dynamic systems that change over time. My research is focused on examining and creating principle-based techniques for these dynamic environments, with a vision of achieving reliable and safe machine learning.
My research agenda aims to enhance the capabilities of machine autonomy by advancing the state-of-the-art in machine learning algorithms and applying them to real-world dynamical systems problems. On one hand, I will work on developing new machine learning algorithms that can improve its performance. On the other hand, I will bridge the gap between machine learning research and its application by solving challenging problems in this field.
Research Framework
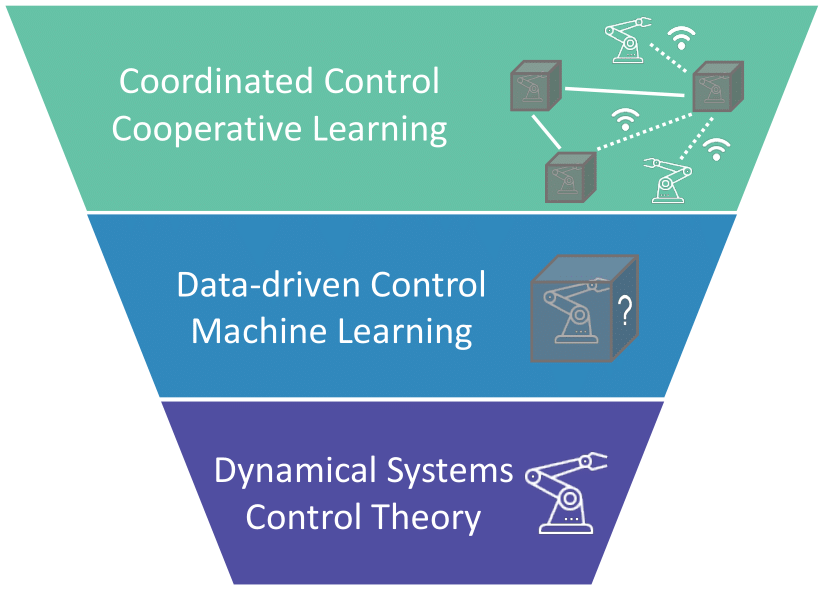 My overall research framework can be divided into three progressive layers.
My overall research framework can be divided into three progressive layers.
In the bottom layer, I focus on the study of dynamical systems and control theory. This layer provides a foundation for understanding the behavior of systems over time and how to design controllers to achieve specific goals. This includes the study of mathematical models of systems, stability analysis, and the design of feedback controllers to regulate the system's behavior. It is essential for the other two layers of your research, where more advanced techniques to improve the performance of the system.
The middle layer of the research investigates on the application of data-driven control and machine learning techniques. Building upon the foundation established in the bottom layer, this layer utilizes collected data and learning algorithms to enhance control performance. The use of data is key in this layer, as it enables the creation of models that can adapt to changes in the system or environment. The goal of this layer is to establish a data-driven model using collected data and machine learning techniques to compensate for unknown components or replace prior dynamics, ultimately leading to an improved system performance. Additionally, this layer aims to improve the performance of the control system by using data to infer the dynamics of the system, and using this information to design controllers that adapt to changing conditions.
The top layer of the research framework extends the single systems to distributed and large-scale systems, through the interaction of agents learning collaboratively improves the overall learning effect allowing for the achievement of more complex tasks. Using the data-driven models established in the middle layer, it applies these techniques across multiple systems and uses the knowledge gained there.
Research Interests
- Machine Learning
- Fusion Learning, Bayesian Learning
- System Identification, Pattern Classification
- Recommender Systems
- Distributed Systems
- Cooperative Learning, Coordination Control
- Communication Effect Analysis
- States Estimation
- Robotics
- Linear & Nonlinear Control
- Underactuated Control
- Model Predict Control
Future Directions
- Deep learning for Vision-Based Control
- Reinforcement Learning for Dynamic Control
- Networked Optimal Control